Voltage Collapse Stabilization
|
|
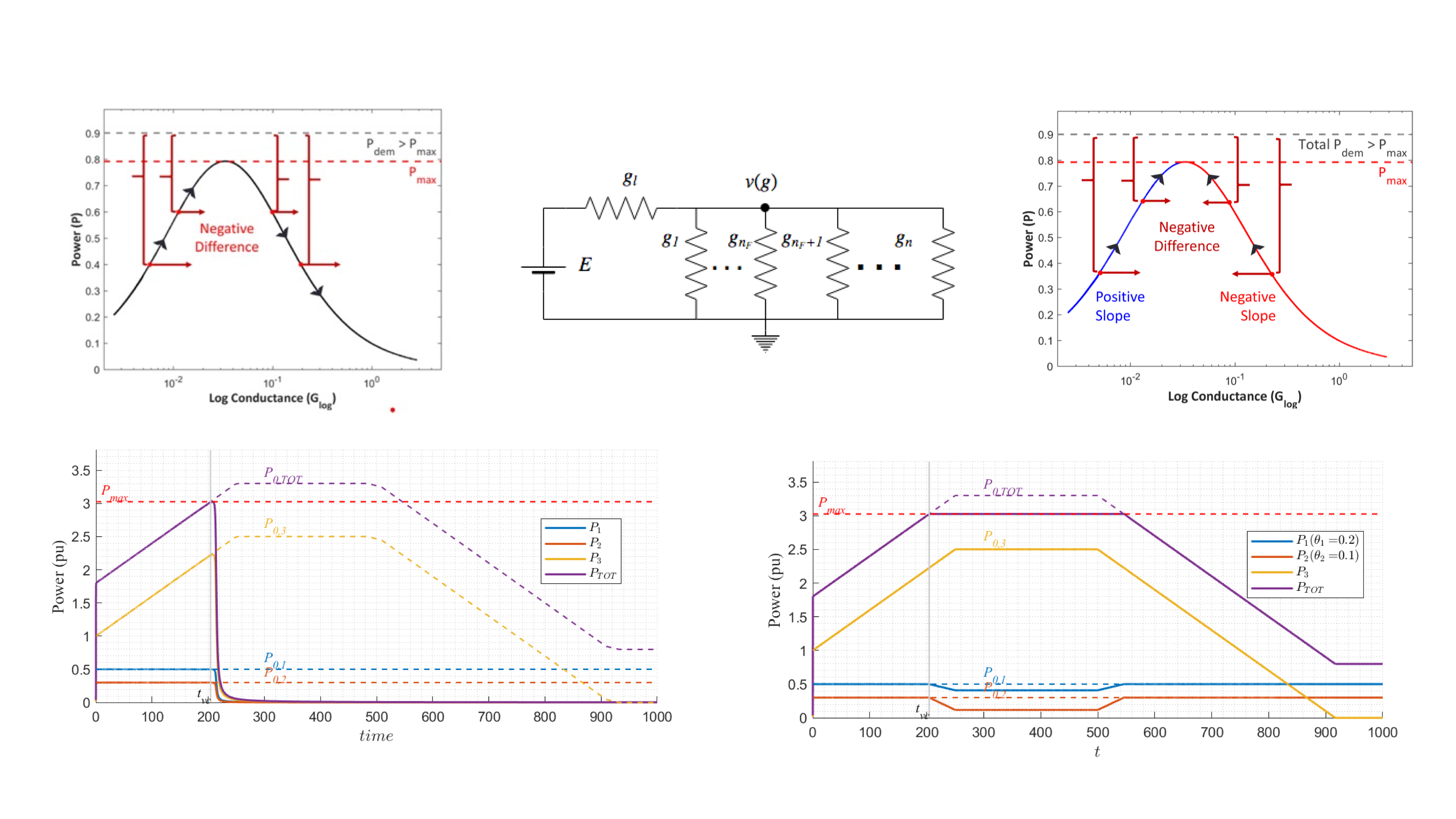
Voltage collapse is a type of blackout-inducing dynamic instability that occurs when the power demand exceeds the maximum power that can be transferred through the network. The traditional (preventive) approach to avoid voltage collapse is based on ensuring that the network never reaches its maximum capacity. However, such an approach leads to inefficiencies as it prevents operators to fully utilize the network resources and does not account for unprescribed events. |
- C. Avraam, J. Rines, A. Sarker, F. Paganini, and E. Mallada, “Voltage Collapse Stabilization in Star DC Networks,” in American Control Conference (ACC), 2019, pp. 1957-1964. doi:10.23919/ACC.2019.8814708
[BibTeX] [Abstract] [Download PDF]
Voltage collapse is a type of blackout-inducing dynamic instability that occurs when the power demand exceeds the maximum power that can be transferred through the network. The traditional (preventive) approach to avoid voltage collapse is based on ensuring that the network never reaches its maximum capacity. However, such an approach leads to inefficiencies as it prevents operators to fully utilize the network resources and does not account for unprescribed events. To overcome this limitation, this paper seeks to initiate the study of voltage collapse stabilization. More precisely, for a DC network, we formulate the problem of voltage stability as a dynamic problem where each load seeks to achieve a constant power consumption by updating its conductance as the voltage changes. We show that such a system can be interpreted as a dynamic game, where each player (load) seeks to myopically maximize their utility, and where every stable power flow solution amounts to a Local Nash Equilibrium. Using this framework, we show that voltage collapse is equivalent to the non-existence of a Local Nash Equilibrium in the game and, as a result, it is caused by the lack of cooperation between loads. Finally, we propose a Voltage Collapse Stabilizer (VCS) controller that uses (flexible) loads that are willing to cooperate and provides a fair allocation of the curtailed demand. Our solution stabilizes voltage collapse even in the presence of non-cooperative loads. Numerical simulations validate several features of our controllers.
@inproceedings{arspm2019acc, abstract = {Voltage collapse is a type of blackout-inducing dynamic instability that occurs when the power demand exceeds the maximum power that can be transferred through the network. The traditional (preventive) approach to avoid voltage collapse is based on ensuring that the network never reaches its maximum capacity. However, such an approach leads to inefficiencies as it prevents operators to fully utilize the network resources and does not account for unprescribed events. To overcome this limitation, this paper seeks to initiate the study of voltage collapse stabilization. More precisely, for a DC network, we formulate the problem of voltage stability as a dynamic problem where each load seeks to achieve a constant power consumption by updating its conductance as the voltage changes. We show that such a system can be interpreted as a dynamic game, where each player (load) seeks to myopically maximize their utility, and where every stable power flow solution amounts to a Local Nash Equilibrium. Using this framework, we show that voltage collapse is equivalent to the non-existence of a Local Nash Equilibrium in the game and, as a result, it is caused by the lack of cooperation between loads. Finally, we propose a Voltage Collapse Stabilizer (VCS) controller that uses (flexible) loads that are willing to cooperate and provides a fair allocation of the curtailed demand. Our solution stabilizes voltage collapse even in the presence of non-cooperative loads. Numerical simulations validate several features of our controllers.}, author = {Avraam, Charalampos and Rines, Jesse and Sarker, Aurik and Paganini, Fernando and Mallada, Enrique}, booktitle = {American Control Conference (ACC)}, doi = {10.23919/ACC.2019.8814708}, grants = {CAREER-1752362,EPCN-1711188,ENERGISE-DE-EE0008006,ARO-W911NF-17-1-0092,EPCN-1711188,CPS-1544771}, keywords = {Power Networks}, month = {06}, pages = {1957-1964}, title = {Voltage Collapse Stabilization in Star DC Networks}, url = {https://mallada.ece.jhu.edu/pubs/2019-ACC-ARSPM.pdf}, year = {2019} }
Understanding the Inefficiency of Economic Dispatch
|
|
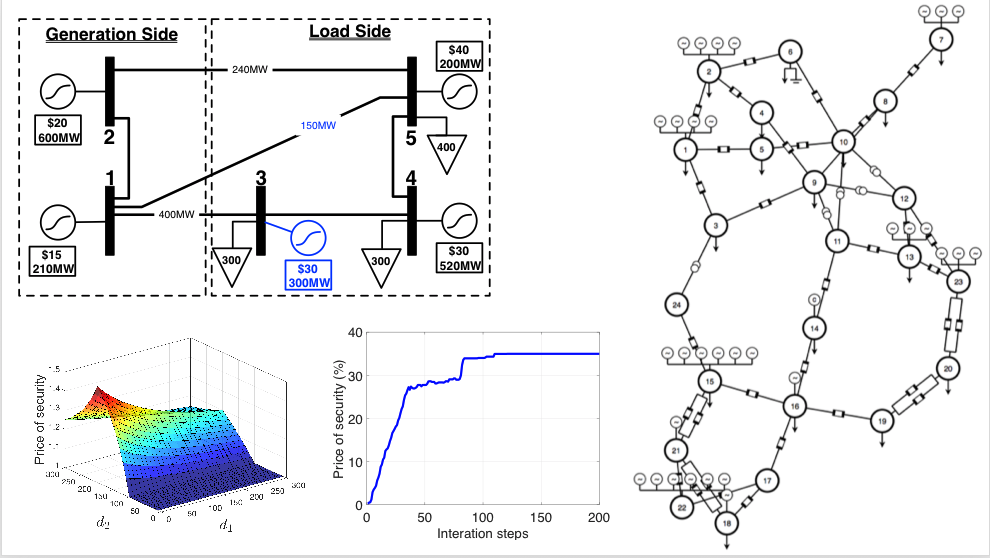
The security-constrained economic dispatch (SCED) problem tries to maintain the reliability of a power network by ensuring that a single failure does not lead to a global outage. The previous research has mainly investigated SCED by formulating the problem in different modalities, e.g. preventive or corrective, and devising effective solutions for SCED. In this work, we tackle a novel and important direction and analyze the economic cost of incorporating security constraints in economic dispatch. Inspired by existing inefficiency metrics in game theory and computer science, we introduce the notion of the price of security as a metric that formally characterizes the economic inefficiency of SCED as compared to the original problem without security constraints. Then, we focus on the preventive approach in a simple topology comprising two buses and two lines and investigate the impact of generation availability and demand distribution on the price of security. Moreover, we explicitly derive the worst-case input instance that leads to the maximum price of security. By experimental study on two test- cases, we verify the analytical results and provide insights for characterizing the price of security in general networks.
|
- M. H. Hajiesmaili, D. Cai, and E. Mallada, “Understanding the Inefficiency of Security-Constrained Economic Dispatch,” in 56th IEEE Conference on Decision and Control (CDC), 2017, pp. 2035-2040. doi:10.1109/CDC.2017.8263947
[BibTeX] [Abstract] [Download PDF]
The security-constrained economic dispatch (SCED) problem tries to maintain the reliability of a power network by ensuring that a single failure does not lead to a global outage. The previous research has mainly investigated SCED by formulating the problem in different modalities, e.g. preventive or corrective, and devising efficient solutions for SCED. In this paper, we tackle a novel and important direction, and analyze the economic cost of incorporating security constraints in economic dispatch. Inspired by existing inefficiency metrics in game theory and computer science, we introduce notion of price of security as a metric that formally characterizes the economic inefficiency of security-constrained economic dispatch as compared to the original problem without security constraints. Then, we focus on the preventive approach in a simple topology comprising two buses and two lines, and investigate the impact of generation availability and demand distribution on the price of security. Moreover, we explicitly derive the worst-case input instance that leads to the maximum price of security. By extensive experimental study on two test-cases, we verify the analytical results and provide insights for characterizing the price of security in general networks.
@inproceedings{hcm2017cdc, abstract = {The security-constrained economic dispatch (SCED) problem tries to maintain the reliability of a power network by ensuring that a single failure does not lead to a global outage. The previous research has mainly investigated SCED by formulating the problem in different modalities, e.g. preventive or corrective, and devising efficient solutions for SCED. In this paper, we tackle a novel and important direction, and analyze the economic cost of incorporating security constraints in economic dispatch. Inspired by existing inefficiency metrics in game theory and computer science, we introduce notion of price of security as a metric that formally characterizes the economic inefficiency of security-constrained economic dispatch as compared to the original problem without security constraints. Then, we focus on the preventive approach in a simple topology comprising two buses and two lines, and investigate the impact of generation availability and demand distribution on the price of security. Moreover, we explicitly derive the worst-case input instance that leads to the maximum price of security. By extensive experimental study on two test-cases, we verify the analytical results and provide insights for characterizing the price of security in general networks.}, author = {Hajiesmaili, Mohammad H. and Cai, Desmond and Mallada, Enrique}, booktitle = {56th IEEE Conference on Decision and Control (CDC)}, doi = {10.1109/CDC.2017.8263947}, grants = {1544771, 1711188, 1736448}, keywords = {Power Networks}, month = {12}, pages = {2035-2040}, title = {Understanding the Inefficiency of Security-Constrained Economic Dispatch}, url = {https://mallada.ece.jhu.edu/pubs/2017-CDC-HCM.pdf}, year = {2017} }
Sparse Recover over Incidence Matrices
|
|
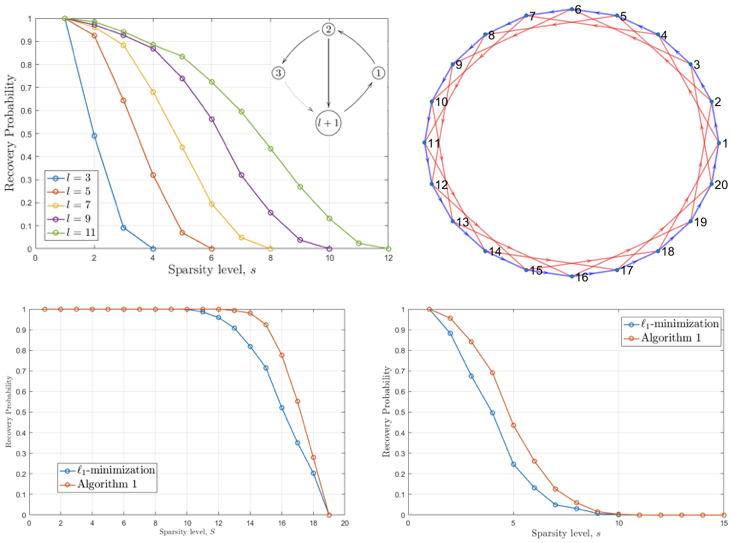
Classical results in sparse recovery guarantee the exact reconstruction of s-sparse signals under assumptions on the dictionary that are either too strong or NP-hard to check. Moreover, such results may be pessimistic in practice since they are based on a worst-case analysis. For instance, Restricted Isometry Property (RIP) which is widely used in the literature is a sufficient condition which is NP-hard to check. Although another widely used condition Mutual Coherence (MC) is relatively easier to verify, it is too conservative and can easily lead to false negative certificates. In addition, a necessary and sufficient condition Nullspace Property (NUP) is also NP-hard to verify in general. In this work, we consider the sparse recovery of signals defined over a graph, for which the dictionary takes the form of an incidence matrix. We derive necessary and sufficient conditions for sparse recovery, which depend on the properties of the cycles of the graph that can be checked in polynomial time. We also characterize all support sets for which L1-minimization recovers the signal exactly in this setting. Finally, we exploit sparsity properties on the measurements and the structure of incidence matrices to propose a specialized subgraph-based recovery algorithm that outperforms the standard L1-minimization approach.
|
Related publications:
- M. Zhao, M. D. Kaba, R. Vidal, D. R. Robinson, and E. Mallada, “Sparse Recovery over Graph Incidence Matrices,” in 57th IEEE Conference on Decision and Control (CDC), 2018, pp. 364-371. doi:10.1109/CDC.2018.8619666
[BibTeX] [Abstract] [Download PDF]
Classical results in sparse representation guarantee the exact recovery of sparse signals under assumptions on the dictionary that are either too strong or NP hard to check. Moreover, such results may be too pessimistic in practice since they are based on a worst-case analysis. In this paper, we consider the sparse recovery of signals defined over a graph, for which the dictionary takes the form of an incidence matrix. We show that in this case necessary and sufficient conditions can be derived in terms of properties of the cycles of the graph, which can be checked in polynomial time. Our analysis further allows us to derive location dependent conditions for recovery that only depend on the cycles of the graph that intersect this support. Finally, we exploit sparsity properties on the measurements to a specialized sub-graph-based recovery algorithm that outperforms the standard $l_1$-minimization.
@inproceedings{zkvrm2018cdc, abstract = {Classical results in sparse representation guarantee the exact recovery of sparse signals under assumptions on the dictionary that are either too strong or NP hard to check. Moreover, such results may be too pessimistic in practice since they are based on a worst-case analysis. In this paper, we consider the sparse recovery of signals defined over a graph, for which the dictionary takes the form of an incidence matrix. We show that in this case necessary and sufficient conditions can be derived in terms of properties of the cycles of the graph, which can be checked in polynomial time. Our analysis further allows us to derive location dependent conditions for recovery that only depend on the cycles of the graph that intersect this support. Finally, we exploit sparsity properties on the measurements to a specialized sub-graph-based recovery algorithm that outperforms the standard $l_1$-minimization.}, author = {Zhao, Mengnan and Kaba, Mustafa Devrim and Vidal, Rene and Robinson, Daniel R. and Mallada, Enrique}, bdsk-url-3 = {https://doi.org/10.1109/CDC.2018.8619666}, booktitle = {57th IEEE Conference on Decision and Control (CDC)}, doi = {10.1109/CDC.2018.8619666}, grants = {AMPS:1736448}, issn = {2576-2370}, month = {12}, pages = {364-371}, title = {Sparse Recovery over Graph Incidence Matrices}, url = {https://mallada.ece.jhu.edu/pubs/2018-CDC-ZKVRM.pdf}, year = {2018} }
Frequency Regulation in Power Networks
|
|
Frequency control rebalances supply and demand while maintaining the network state within operational margins. It is implemented using fast ramping reserves that are expensive and wasteful, and which are expected to grow with the increasing penetration of renewables. The most promising solution to this problem is the use of demand response, i.e. load participation in frequency control. Yet it is still unclear how to efficiently integrate load participation without introducing instabilities and violating operational constraints. In this work we present a comprehensive load-side frequency control mechanism that can maintain the grid within operational constraints. Our controllers can rebalance supply and demand after disturbances, restore the frequency to its nominal value and preserve inter-area power flows. Furthermore, our controllers are distributed (unlike generation-side), can allocate load updates optimally, and can maintain line flows within thermal limits. We prove that such a distributed load-side control is globally asymptotically stable and robust to unknown load parameters |
Related publications:
- C. Zhao, E. Mallada, S. H. Low, and J. W. Bialek, “Distributed plug-and-play optimal generator and load control for power system frequency regulation,” International Journal of Electric Power and Energy Systems, vol. 101, pp. 1-12, 2018. doi:https://doi.org/10.1016/j.ijepes.2018.03.014
[BibTeX] [Abstract] [Download PDF]
A distributed control scheme, which can be implemented on generators and controllable loads in a plug-and-play manner, is proposed for power system frequency regulation. The proposed scheme is based on local measurements, local computation, and neighborhood information exchanges over a communication network with an arbitrary (but connected) topology. In the event of a sudden change in generation or load, the proposed scheme can restore the nominal frequency and the reference inter-area power flows, while minimizing the total cost of control for participating generators and loads. Power network stability under the proposed control is proved with a relatively realistic model which includes nonlinear power flow and a generic (potentially nonlinear or high-order) turbine-governor model, and further with first- and second-order turbine-governor models as special cases. In simulations, the proposed control scheme shows a comparable performance to the existing automatic generation control (AGC) when implemented only on the generator side, and demonstrates better dynamic characteristics that AGC when each scheme is implemented on both generators and controllable loads.
@article{zmlb2018ijepes, abstract = {A distributed control scheme, which can be implemented on generators and controllable loads in a plug-and-play manner, is proposed for power system frequency regulation. The proposed scheme is based on local measurements, local computation, and neighborhood information exchanges over a communication network with an arbitrary (but connected) topology. In the event of a sudden change in generation or load, the proposed scheme can restore the nominal frequency and the reference inter-area power flows, while minimizing the total cost of control for participating generators and loads. Power network stability under the proposed control is proved with a relatively realistic model which includes nonlinear power flow and a generic (potentially nonlinear or high-order) turbine-governor model, and further with first- and second-order turbine-governor models as special cases. In simulations, the proposed control scheme shows a comparable performance to the existing automatic generation control (AGC) when implemented only on the generator side, and demonstrates better dynamic characteristics that AGC when each scheme is implemented on both generators and controllable loads.}, author = {Zhao, Changhong and Mallada, Enrique and Low, Steven H and Bialek, Janusz W}, bdsk-url-3 = {https://doi.org/10.1016/j.ijepes.2018.03.014}, doi = {https://doi.org/10.1016/j.ijepes.2018.03.014}, grants = {W911NF-17-1-0092, 1544771, 1711188, 1736448, 1752362}, issn = {0142-0615}, journal = {International Journal of Electric Power and Energy Systems}, keywords = {Power Networks; Frequency Control}, month = {10}, pages = {1 -12}, title = {Distributed plug-and-play optimal generator and load control for power system frequency regulation}, url = {https://mallada.ece.jhu.edu/pubs/2018-IJEPES-ZMLB.pdf}, volume = {101}, year = {2018} } - E. Mallada, C. Zhao, and S. H. Low, “Optimal load-side control for frequency regulation in smart grids,” IEEE Transactions on Automatic Control, vol. 62, iss. 12, pp. 6294-6309, 2017. doi:10.1109/TAC.2017.2713529
[BibTeX] [Abstract] [Download PDF]
Frequency control rebalances supply and demand while maintaining the network state within operational margins. It is implemented using fast ramping reserves that are expensive and wasteful, and which are expected to grow with the increasing penetration of renewables. The most promising solution to this problem is the use of demand response, i.e. load participation in frequency control. Yet it is still unclear how to efficiently integrate load participation without introducing instabilities and violating operational constraints. In this paper we present a comprehensive load-side frequency control mechanism that can maintain the grid within operational constraints. Our controllers can rebalance supply and demand after disturbances, restore the frequency to its nominal value and preserve inter-area power flows. Furthermore, our controllers are distributed (unlike generation-side), can allocate load updates optimally, and can maintain line flows within thermal limits. We prove that such a distributed load-side control is globally asymptotically stable and robust to unknown load parameters. Simulations are used to illustrate the properties of our solution.
@article{mzl2017tac, abstract = {Frequency control rebalances supply and demand while maintaining the network state within operational margins. It is implemented using fast ramping reserves that are expensive and wasteful, and which are expected to grow with the increasing penetration of renewables. The most promising solution to this problem is the use of demand response, i.e. load participation in frequency control. Yet it is still unclear how to efficiently integrate load participation without introducing instabilities and violating operational constraints. In this paper we present a comprehensive load-side frequency control mechanism that can maintain the grid within operational constraints. Our controllers can rebalance supply and demand after disturbances, restore the frequency to its nominal value and preserve inter-area power flows. Furthermore, our controllers are distributed (unlike generation-side), can allocate load updates optimally, and can maintain line flows within thermal limits. We prove that such a distributed load-side control is globally asymptotically stable and robust to unknown load parameters. Simulations are used to illustrate the properties of our solution.}, author = {Mallada, Enrique and Zhao, Changhong and Low, Steven H}, doi = {10.1109/TAC.2017.2713529}, grants = {1544771}, journal = {IEEE Transactions on Automatic Control}, keywords = {Power Networks}, month = {12}, number = {12}, pages = {6294-6309}, title = {Optimal load-side control for frequency regulation in smart grids}, url = {https://mallada.ece.jhu.edu/pubs/2017-TAC-MZL.pdf}, volume = {62}, year = {2017} } - C. Zhao, E. Mallada, S. H. Low, and J. W. Bialek, “A Unified Framework for Frequency Control and Congestion Management,” in Power Systems Computation Conference, 2016, pp. 1-7. doi:10.1109/PSCC.2016.7541028
[BibTeX] [Abstract] [Download PDF]
The existing frequency control framework in power systems is challenged by lower inertia and more volatile power injections. We propose a new framework for frequency control and congestion management. We formulate an optimization problem that rebalances power, restores the nominal frequency, restores inter-area flows and maintains line flows below their limits in a way that minimizes the control cost. The cost can be squared deviations from the reference generations, minimizing the disruption from the last optimal dispatch. Our control thus maintains system security without interfering with the market operation. By deriving a primal-dual algorithm to solve this optimization, we design a completely decentralized primary frequency control without the need for explicit communication among the participating agents, and a distributed unified control which integrates primary and secondary frequency control and congestion management. Simulations show that the unified control not only achieves all the desired control goals in system equilibrium, but also improves the transient compared to traditional control schemes.
@inproceedings{zmlb2016pscc, abstract = {The existing frequency control framework in power systems is challenged by lower inertia and more volatile power injections. We propose a new framework for frequency control and congestion management. We formulate an optimization problem that rebalances power, restores the nominal frequency, restores inter-area flows and maintains line flows below their limits in a way that minimizes the control cost. The cost can be squared deviations from the reference generations, minimizing the disruption from the last optimal dispatch. Our control thus maintains system security without interfering with the market operation. By deriving a primal-dual algorithm to solve this optimization, we design a completely decentralized primary frequency control without the need for explicit communication among the participating agents, and a distributed unified control which integrates primary and secondary frequency control and congestion management. Simulations show that the unified control not only achieves all the desired control goals in system equilibrium, but also improves the transient compared to traditional control schemes.}, author = {Zhao, Changhong and Mallada, Enrique and Low, Steven H and Bialek, Janusz W}, booktitle = {Power Systems Computation Conference}, doi = {10.1109/PSCC.2016.7541028}, keywords = {Power Networks; Frequency Control; Congestion Management}, month = {06}, pages = {1--7}, title = {A Unified Framework for Frequency Control and Congestion Management}, url = {https://mallada.ece.jhu.edu/pubs/2016-PSCC-ZMLB.pdf}, year = {2016} }
Synchronization of Coupled Oscillators
 |
The study of synchronization of coupled oscillators has attracted the attention of widely diverse research disciplines ranging from biology and chemistry, to engineering and physics. Since the seminal works of Winfree and Kuramoto, phase coupled oscillators have served as a canonical model for synchronization that can capture a quite rich dynamic behavior including multiple equilibria, limit cycles, and even chaos. In this work we study how the interaction type (coupling), network configuration (topology), communication latencies (delay) and oscillator types (frequency heterogeneity) affect the behavior of a population of identical oscillators. Using this knowledge, we design a family of controllers that can guarantee phase consensus (common phase value) for arbitrary network topologies and frequencies. |
Related publications:
- A. Gushchin, E. Mallada, and A. Tang, “Phase-coupled oscillators with plastic coupling: Synchronization and stability,” IEEE Transactions on Network Science and Engineering, vol. 3, iss. 4, pp. 240-256, 2016. doi:10.1109/TNSE.2016.2605096
[BibTeX] [Abstract] [Download PDF]
In this article we study synchronization of systems of homogeneous phase-coupled oscillators with plastic coupling strengths and arbitrary underlying topology. The dynamics of the coupling strength between two oscillators is governed by the phase difference between these oscillators. We show that, under mild assumptions, such systems are gradient systems, and always achieve frequency synchronization. Furthermore, we provide sufficient stability and instability conditions that are based on results from algebraic graph theory. For a special case when underlying topology is a tree, we formulate a criterion (necessary and sufficient condition) of stability of equilibria. For both, tree and arbitrary topologies, we provide sufficient conditions for phase-locking, i.e. convergence to a stable equilibrium almost surely. We additionally find conditions when the system possesses a unique stable equilibrium, and thus, almost global stability follows. Several examples are used to demonstrate variety of equilibria the system has, their dependence on system’s parameters, and to illustrate differences in behavior of systems with constant and plastic coupling strengths.
@article{gmt2016tnse, abstract = {In this article we study synchronization of systems of homogeneous phase-coupled oscillators with plastic coupling strengths and arbitrary underlying topology. The dynamics of the coupling strength between two oscillators is governed by the phase difference between these oscillators. We show that, under mild assumptions, such systems are gradient systems, and always achieve frequency synchronization. Furthermore, we provide sufficient stability and instability conditions that are based on results from algebraic graph theory. For a special case when underlying topology is a tree, we formulate a criterion (necessary and sufficient condition) of stability of equilibria. For both, tree and arbitrary topologies, we provide sufficient conditions for phase-locking, i.e. convergence to a stable equilibrium almost surely. We additionally find conditions when the system possesses a unique stable equilibrium, and thus, almost global stability follows. Several examples are used to demonstrate variety of equilibria the system has, their dependence on system's parameters, and to illustrate differences in behavior of systems with constant and plastic coupling strengths.}, author = {Gushchin, Andrey and Mallada, Enrique and Tang, Ao}, doi = {10.1109/TNSE.2016.2605096}, journal = {IEEE Transactions on Network Science and Engineering}, keywords = {Synchronization}, month = {09}, number = {4}, pages = {240-256}, title = {Phase-coupled oscillators with plastic coupling: Synchronization and stability}, url = {https://mallada.ece.jhu.edu/pubs/2016-TNSE-GMT.pdf}, volume = {3}, year = {2016} } - E. Mallada, R. A. Freeman, and A. Tang, “Distributed synchronization of heterogeneous oscillators on networks with arbitrary topology,” IEEE Transactions on Control of Network Systems, vol. 3, iss. 1, pp. 12-23, 2016. doi:10.1109/TCNS.2015.2428371
[BibTeX] [Abstract] [Download PDF]
Many network applications rely on the synchronization of coupled oscillators. For example, such synchronization can provide networked devices with a common temporal reference necessary for coordinating actions or decoding transmitted messages. In this paper, we study the problem of using distributed control to achieve both phase and frequency synchronization of a network of coupled heterogeneous nonlinear oscillators. Not only do our controllers guarantee zero phase error in steady state under arbitrary frequency heterogeneity, but they also require little knowledge of the oscillator nonlinearities and network topology. Furthermore, we provide a global convergence analysis, in the absence of noise and propagation delay, for the resulting nonlinear system whose phase vector evolves on the n-torus.
@article{mft2016tcns, abstract = {Many network applications rely on the synchronization of coupled oscillators. For example, such synchronization can provide networked devices with a common temporal reference necessary for coordinating actions or decoding transmitted messages. In this paper, we study the problem of using distributed control to achieve both phase and frequency synchronization of a network of coupled heterogeneous nonlinear oscillators. Not only do our controllers guarantee zero phase error in steady state under arbitrary frequency heterogeneity, but they also require little knowledge of the oscillator nonlinearities and network topology. Furthermore, we provide a global convergence analysis, in the absence of noise and propagation delay, for the resulting nonlinear system whose phase vector evolves on the n-torus.}, author = {Mallada, Enrique and Freeman, Randy A and Tang, Ao}, doi = {10.1109/TCNS.2015.2428371}, journal = {IEEE Transactions on Control of Network Systems}, keywords = {Coupled Oscillators; Synchronization}, month = {3}, number = {1}, pages = {12-23}, title = {Distributed synchronization of heterogeneous oscillators on networks with arbitrary topology}, url = {https://mallada.ece.jhu.edu/pubs/2016-TCNS-MFT.pdf}, volume = {3}, year = {2016} } - E. Mallada and A. Tang, “Synchronization of weakly coupled oscillators: coupling, delay and topology,” Journal of Physics A: Mathematical and Theoretical, vol. 46, iss. 50, p. 505101, 2013. doi:10.1088/1751-8113/46/50/505101
[BibTeX] [Abstract] [Download PDF]
There are three key factors in a system of coupled oscillators that characterize the interaction between them: coupling (how to affect), delay (when to affect) and topology (whom to affect). The existing work on each of these factors has mainly focused on special cases. With new angles and tools, this paper makes progress in relaxing some assumptions on these factors. There are three main results in this paper. Firstly, by using results from algebraic graph theory, a sufficient condition is obtained that can be used to check equilibrium stability. This condition works for arbitrary topology, generalizing existing results and also leading to a sufficient condition on the coupling function which guarantees that the system will reach synchronization. Secondly, it is known that identical oscillators with sin () coupling functions are guaranteed to synchronize in phase on a complete graph. Our results prove that in many cases certain structures such as symmetry and concavity, rather than the exact shape of the coupling function, are the keys for global synchronization. Finally, the effect of heterogenous delays is investigated. Using mean field theory, a system of delayed coupled oscillators is approximated by a non-delayed one whose coupling depends on the delay distribution. This shows how the stability properties of the system depend on the delay distribution and allows us to predict its behavior. In particular, we show that for sin () coupling, heterogeneous delays are equivalent to homogeneous delays. Furthermore, we can use our novel sufficient instability condition to show that heterogeneity, i.e. wider delay distribution, can help reach in-phase synchronization.
@article{mt2013jopa, abstract = {There are three key factors in a system of coupled oscillators that characterize the interaction between them: coupling (how to affect), delay (when to affect) and topology (whom to affect). The existing work on each of these factors has mainly focused on special cases. With new angles and tools, this paper makes progress in relaxing some assumptions on these factors. There are three main results in this paper. Firstly, by using results from algebraic graph theory, a sufficient condition is obtained that can be used to check equilibrium stability. This condition works for arbitrary topology, generalizing existing results and also leading to a sufficient condition on the coupling function which guarantees that the system will reach synchronization. Secondly, it is known that identical oscillators with sin () coupling functions are guaranteed to synchronize in phase on a complete graph. Our results prove that in many cases certain structures such as symmetry and concavity, rather than the exact shape of the coupling function, are the keys for global synchronization. Finally, the effect of heterogenous delays is investigated. Using mean field theory, a system of delayed coupled oscillators is approximated by a non-delayed one whose coupling depends on the delay distribution. This shows how the stability properties of the system depend on the delay distribution and allows us to predict its behavior. In particular, we show that for sin () coupling, heterogeneous delays are equivalent to homogeneous delays. Furthermore, we can use our novel sufficient instability condition to show that heterogeneity, i.e. wider delay distribution, can help reach in-phase synchronization.}, author = {Mallada, Enrique and Tang, Ao}, doi = {10.1088/1751-8113/46/50/505101}, journal = {Journal of Physics A: Mathematical and Theoretical}, keywords = {Coupled Oscillators; Synchronization}, month = {12}, number = {50}, pages = {505101}, title = {Synchronization of weakly coupled oscillators: coupling, delay and topology}, url = {https://mallada.ece.jhu.edu/pubs/2013-JOPA-MT.pdf}, volume = {46}, year = {2013} }